




An underground gold mine in Stewart, British Columbia, closed since the 1940s, probably isn’t the first place you’d expect to find a demonstration of cutting-edge drone mapping technology. Yet, in this unlikely setting, pioneering autonomous robots are taking mining cartography to new heights.
People have been creating rudimentary maps of mines for years. But it’s a challenging job, and not all tools are created equal. Alternative approaches, such as handheld laser tools, would require humans to enter areas of the mine considered unsafe due to age. Progress has been made to use Boston Dynamic’s Spot quadruped in underground mining environments, but higher levels of autonomy are required for the robot to benefit daily operations.
However, a lot of progress has been made recently in the use of autonomous aerial robots underground to replace traditional static cavity monitoring systems. Depending on the size of the drifts in an abandoned mine these robots can be used to explore and map unknown areas. And if the paths are too tight, portable SLAM (simultaneous localization and mapping) mapping systems can be used either by hand or mounted to a backpack.

Stepping into the unknown with autonomous drones
Back in 2019 as we were commercializing the ExynAero, we got a call from gold and silver mining experts, Ascot Resources, with a unique problem they needed to solve. They needed a tool to help them better determine the remaining reserves in one of their oldest mines located in The Big Missouri Ridge.
After a near 13-hour journey from our home base in Philadelphia – culminating in a helicopter journey across a glacier and having to lug their equipment up a half-kilometer incline to reach the mine entrance – the Exyn team arrived at the site.
Geologists at Ascot knew from surface drilling programs that there was still some gold but required further inspection to determine the extent of the resources. Typically, surveyors would enter with handheld cavity monitoring tools but narrower tunnels and more limited vehicle access due to the constraints of 1940s technology presented logistical challenges for human teams that would attempt to survey the mine.
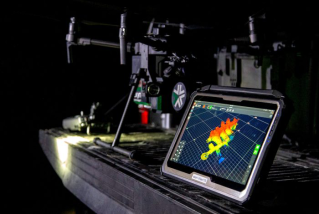
Photo courtesy of Richard Bishop.
Once the team was onsite, surveyors were able to take a single robot and tablet to map the entire mine. The ruggedized tablet is crucial for this type of work so that survey teams can monitor the quality of their maps and ensure they’ve gathered enough data to complete their reports. After a day of mapping, the Ascot survey team was able to create a report of existing mine openings and determine how much gold there was left to be mined inside to present to potential investors.
I know this use case might sound like a one-off marketing story, but there is actually a large opportunity for these autonomous mapping systems to make a significant impact on old, abandoned mine revitalization.
Good Samaritans to the rescue
Currently, the United States has approximately 140,000 abandoned hardrock mines, most of which pose environmental hazards due to leaking toxic chemicals into the water shelf. Under current law, any organizations that attempt to clean up these sites will be held responsible for any negative environmental impacts. Thankfully, there is a piece of bipartisan legislation looking to address this issue.
The Good Samaritan Remediation of Abandoned Hardrock Mines Act of 2022 would provide protections or incentives for organizations that voluntarily take actions to clean up and remediate these abandoned sites. This could include reducing the liability for potential environmental damages that could arise during the cleanup process.
This kind of legislation is designed to address the environmental and safety hazards associated with abandoned hardrock mines and could potentially provide a way to expedite the cleanup of these sites by encouraging non-responsible parties to get involved without fear of taking on undue liabilities.
During this cleanup process, autonomous aerial robots or SLAM-based portable mapping systems can be used to update old mine maps to potentially detect other environmental hazards or prepare reports of ore deposits for potential investors. Beyond simply mapping cavities, the ultimate goal of autonomous robots in underground mining is preventing a human from ever needing to go underground again.
The Future of underground autonomous robotics
To this end, we partnered with Sandvik to pursue a proof of concept of an autonomous underground wheeled vehicle that carries an ExynAero for aerial mapping. This greatly extends the reach of both robots, enabling them to explore while a human operator observes from a surface location.
Autonomous robots are a powerful tool that can be used to resurrect old mines while pushing the mining industry forward with safe, more efficient surveying tools. Equipped with advanced sensors and AI, these robots can navigate hazardous environments, collect data, and create comprehensive 3D maps faster and more accurately than human surveyors. Not only do they mitigate the risk of human exposure to potentially dangerous conditions, but they also streamline the exploration process, thus paving the way for a new era in the mining industry.
Read the full article on Canadian Mining Magazine


