



The coverage area of RTK correction services such as HxGN SmartNet becomes larger, and its usage is more common amongst the surveyors. When configuring RTK rover settings and selecting a mount point at the specified NTRIP server address, users have different options for their network RTK correction types, such as Nearest, iMAX (individualized Master-AuXiliary), MAX (Master-AuXiliary), and VRS (Virtual Reference Station) and often they don’t know which one to choose to achieve the optimal rover positioning performance. This article will explain the main characteristics of these network RTK correction types and discuss practical aspects that need to be considered when selecting them. In case of any technical questions, please contact your local CRK sales or support team.
This article is divided into the following sections:
- Network RTK correction types and main differences between them
- GNSS signals usage: the first consideration when selecting your correction type
- Network solution vs. Single baseline: what needs to be considered?
- Traceability and interoperability: when is this important?
- So then… what to choose? VRS or iMAX?
- Summary and further recommendations
1. Network RTK correction types and main differences between them
Nearest: This method requires the rover to upload its location information to the service provider, e.g., via NMEA message, indicating that two-way communication is needed. The reference station closest to the rover will be automatically selected to enable a single baseline solution without applying network corrections or mitigating distance-dependent systematic errors caused by atmospheric refractions and satellite orbit errors.
MAX: This method gives the rover the control to calculate distance-dependent error corrections by itself, based on all relevant information on the atmospheric and geometric errors observed by the reference network. Therefore, the rover does not need to send its location to the RTK service provider (i.e., one-way communication) and can perform true multiple baseline positioning instead of a single baseline solution. Note that only GPS and GLONASS are supported in MAX.
iMAX: This method also requires the rover to upload its location to the service provider where the Master-Auxiliary corrections are calculated. iMAX uses a real reference station as the source for the network corrections so there is traceability for the corrections received by the rover.
VRS: This method also requires the rover to provide its location to the service provider where a virtual base station is created in the vicinity of the rover. Due to the short baseline length, distance-dependent systematic errors are largely reduced to improve RTK performance. Note that the position of the virtual base station can change if the rover is far away from its initial point.
| Aspect | Nearest | MAX | iMAX | VRS |
|---|---|---|---|---|
| GNSS support | Full GNSS | GPS & GLO | Full GNSS | Full GNSS |
| Frequency support | Multiple | Dual (L1 & L2) | Multiple | Multiple |
| Communication to rover | Two-way | One-way | Two-way | Two-way |
| Use network corrections | No | Yes | Yes | Yes |
| Network solution performed by | - | Rover | Server | Server |
| Use a real base station | Yes | Yes | Yes | No |
| Multiple baseline positioning | No | Yes | No | No |
2. GNSS signals usage: the first consideration when selecting your correction type
Constellations and signal tracking: GNSS RTK rovers equipped with a modern measurement engine (ME) are capable of tracking satellite signals from multiple constellations at multiple frequencies.
- Leica GNSS receivers incorporate the latest generation of ME with full GNSS tracking capability, supporting all current and future signals from GPS, GLONASS, Galileo, BeiDou, QZSS, and NavIC. In this case, network RTK correction types with full GNSS support like Nearest, iMAX, and VRS are recommended to benefit from multi-GNSS and multi-frequency RTK positioning, particularly in challenging environments.
- Considering legacy rovers such as Leica GPS1200 receivers, which support GPS and GLONASS tracking on the L1 and L2 bands only, MAX is still a good choice due to its flexible rover-controlled network solution with multiple baseline positioning capabilities.
Maximizing the usage of the available satellite data: signals included in the RTK data play an important role in the positioning performance since only common signals available at both base and rover are used for RTK calculation. To maximize the rover’s ability to provide an RTK fixed solution, particularly under difficult conditions, the network RTK correction type needs to maximize the use of all available satellite data. Provided that the rover enables full GNSS tracking, the more signals are included in the RTK corrections, the more common satellites will be used for positioning and the better the positioning performance will be. In the rover RTK Data Link Status panel of the Leica Captivate software, it is possible to view the GNSS signals included in the RTK data. It would be important to check this panel to ensure that the RTK service provider is transmitting all the expected signals from the supported constellations.
 The examples to the left and in the middle (VRS and iMAX) provide a larger number of signals in the RTK corrections. The example to the right (MAX) offers a significantly smaller number of satellites, independently of the rover's capabilities to track all the constellations.
The examples to the left and in the middle (VRS and iMAX) provide a larger number of signals in the RTK corrections. The example to the right (MAX) offers a significantly smaller number of satellites, independently of the rover's capabilities to track all the constellations.
The more signals, the better, and this is something to consider from both rover and base/service perspective… reminding you of the importance of having a rover tracking all the constellations, and likewise, remember that constellations handled by the server/base are equally important, so remember to check the rover RTK Data Link Status panel to ensure that the server is transmitting signals as expected.
3. Network solution vs. Single baseline: what needs to be considered?
Distance-dependent errors are appropriately modeled and then mitigated in a network solution. This allows long baseline lengths between the reference stations and the rover. This advantage is particularly relevant in a sparse RTK network.
- iMAX and VRS are the two network types that use network corrections, plus full GNSS support.
- Nearest is a valid alternative when working in dense RTK networks, and over short baselines (e.g., less than 5 km), where common satellites are maximized, and distance-dependent errors are largely reduced by differencing. In this scenario, a single baseline solution would be provided using the closest reference station as the base.
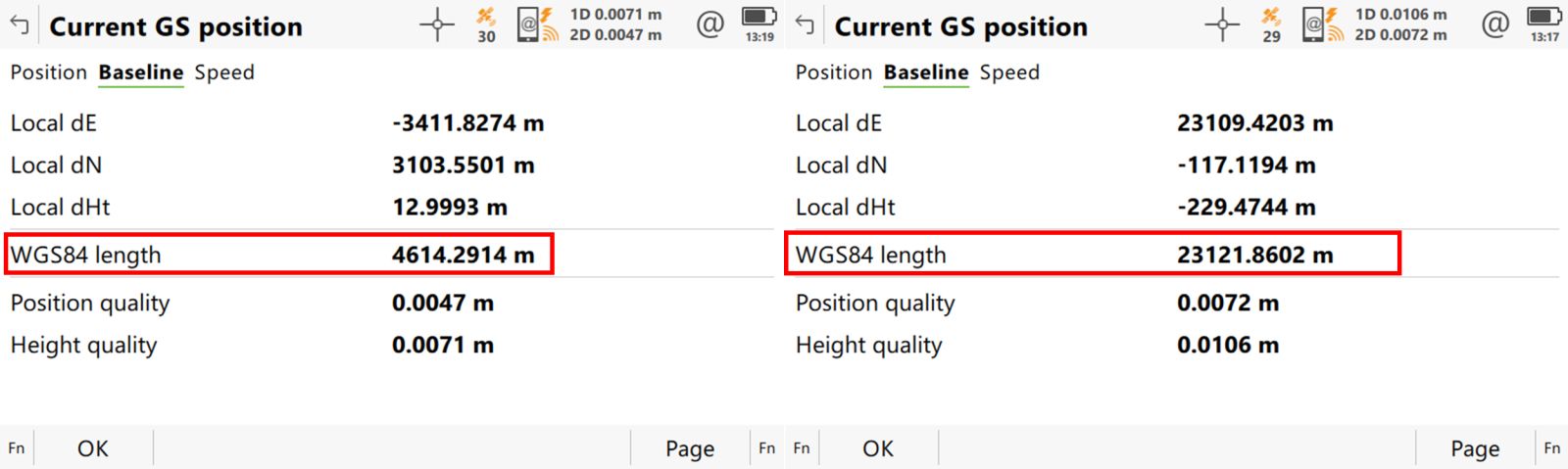
Keep in mind there is no practical indication of the quality of the corrections being received in the rover, other than the baseline length. So, when comparing 2 network solutions of the same type, it would be recommended to check this value in Leica Captivate (Note: usually, the decision on the mount point to choose for your solution will be the closest one, but it should be noted that the value displayed in the mount point table is a point attribute that is being “typed-in”, not calculated, hence it could differ from the actual baseline length).
A network solution is recommended over Nearest solution due to the mitigation of distance-dependent systematic errors.
4. Traceability and interoperability: when is this important?
Traceability: RTK data is traceable when it is directly related to a real reference station. In some local survey regulations and jurisdictions, this could be a requirement.- When using the VRS method, the rover receives corrections from a virtual reference station instead of a real one. This means, that the baseline between the virtual reference station and the measured point cannot be directly remeasured. Therefore, the RTK measurements with VRS are not traceable.
- The iMAX method refers to one physical reference station, hence, it is traceable and repeatable.
Interoperability: the concept relates to the capacity of the network RTK correction type to be implemented/available in 3rd party services (e.g., a national institute providing RTK corrections). From this point of view, although both iMAX and VRS are "non-standardized" methods. Both can be and are widely used in the market.
VRS is better established than iMAX solution throughout RTK correction service providers, but iMAX uses a physical reference station as base station.
5. So then… what to choose? VRS or iMAX?
Once the alternatives are narrowed down, and in a scenario where both methods are supported by rover and server, the question would be: which method should I choose? The answer to the question is: it should not matter… both should deliver a similar solution. On the practical side, there might be slight differences, but they are totally unpredictable. The best practice would be to do a quick test and compare both solutions in the rover RTK Data Link Status panel of Leica Captivate. In case of discrepancies, use the solution delivering the higher number of signals and satellites.
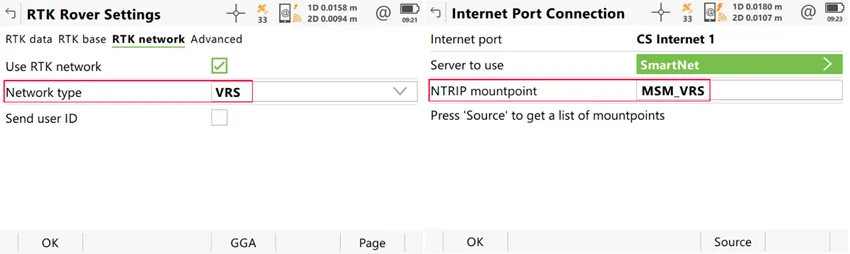
It is important to keep the consistency between the RTK network type configuration at the rover and the correction type of the selected NTRIP mount point. An inconsistent configuration could cause differences in handling atmospheric errors between the network and the rover, leading to degradations in rover positioning performance (i.e., RTK will still work with an inconsistent configuration… but performance won't be optimal).
Summary and further recommendations
Considering the main characteristics of the network RTK correction types and different aspects in high-precision GNSS surveying practice, the following recommendations are made to achieve the optimal rover positioning performance, particularly in difficult environments:
- Use MAX only for legacy rovers with dual-frequency GPS and GLONASS tracking capability.
- There is no specific scenario where Nearest is recommended, but it could be acceptable in specific cases (e.g., sparse RTK network and short baseline to the Nearest).
- Use iMAX or VRS rather than Nearest, especially in sparse RTK networks, due to the benefits of applying network corrections.
- Use VRS rather than iMAX in the following cases:
- A real reference station is not required.
- When using non-Leica rovers that do not support iMAX (e.g., running an RTK performance comparison between a competitor and a Leica receiver).
- A Leica rover is operating in a third-party RTK network which might not provide an iMAX solution.
- Use iMAX rather than VRS if a real reference station is required in RTK surveying applications for better traceability.
