



Laser scanning is a powerful technology that has revolutionised the field of surveying and engineering. However, it can be quite technical and complex, with many specialized terms and jargon that can be difficult to understand.
In this blog, we'll provide an A-Z glossary of laser scanning terms to help demystify this technology and make it more accessible to everyone.

A - Accuracy: The degree of correctness or precision in measurements taken by a laser scanner, how close a measurement is to the true value. Accuracy is a critical factor in laser scanning, as it affects the reliability and quality of the resulting data.
A - Airborne LiDAR: A type of laser scanning that is mounted on an aircraft or drone, allowing for rapid coverage of large areas and high-resolution 3D mapping of terrain and vegetation.
A - Amplitude: The strength or intensity of an echo signal returned by a laser scanner. Amplitude is a measure of the reflectivity of the target surface.
A - Angle of incidence: The angle between the laser beam and the normal of the target surface at the point of incidence. The angle of incidence affects the accuracy, reflectivity, and precision laser scanning measurements.
A - Angular resolution: The smallest angle that can be resolved by a laser scanner. Angular resolution affects the level of detail and accuracy of laser scan data.
A - Automatic Registration: Automatic registration is a process used in laser scanning to align multiple scans of the same area or object. The goal is to create a single, unified point cloud that accurately represents the entire scanned area or object. Automatic registration relies on sophisticated algorithms that compare common features in each scan and use this information to determine their relative positions and orientations. This process can greatly reduce the time and effort required for post-processing and registration of large laser scanning datasets.
B - Backscatter: The reflection of laser energy from a surface back to the laser scanner. Backscatter can occur when laser energy encounters dust, smoke, or other airborne particles in the scanning environment.
B - Bathymetric Laser Scanning: Bathymetric laser scanning is a technique used for measuring underwater topography and bathymetry. It involves the use of a laser scanner mounted on a boat or other aquatic vehicle, which emits laser pulses that penetrate through water and reflect from the seabed. The resulting data is used to create detailed maps of underwater features such as seafloor contours, reefs, and shipwrecks.
B - BDS (BeiDou Navigation Satellite System): A satellite navigation system developed by China that provides positioning and timing information.
B - Beam diameter/beam width: The width of the laser beam emitted by a laser scanner. Beam diameter affects the resolution and accuracy of laser scanning measurements.
B - Beam divergence (angular width): The spread of the laser beam emitted by a laser scanner. Beam divergence affects the range and resolution of laser scanned objects and measurements.
C - Check & Adjust: Check and adjust is a process used in laser scanning to ensure the accuracy and consistency of the collected data. It involves comparing the laser scanner's measurements to a reference standard and making any necessary adjustments to the scanner's settings or calibration.
C - Cloud-to-cloud registration: The process of aligning multiple laser scans of the same or similar area to create a single combined, seamless 3D point cloud without the use of any targets. Cloud-to-cloud registration is essential for creating accurate and complete 3D models of complex environments.
C - Clutter: The presence of extraneous or irrelevant information in a laser scanning dataset, which can make it more difficult to extract meaningful information or perform analysis.
C - Coarse Registration: Coarse registration is a process used in laser scanning to roughly align multiple scans of the same area or object. It is typically performed prior to automatic registration and is used to ensure that the scans are roughly oriented and positioned correctly before the more precise automatic registration process is applied. Coarse registration is usually performed manually by aligning common features or landmarks in each scan.
C - Colourisation: The process of applying real-world RGB colour from imagery to the point cloud by overlaying the correct or nearest pixel to points captured at the same origin.
C - Compensator: A compensator is a component of a laser scanner that helps correct for distortions caused by the movement or vibration of the scanner. It works by measuring the position and orientation of the scanner and adjusting the laser beam accordingly.
C - Coordinate System: A system of coordinates used to define the position and orientation of objects in space. Laser scanning data is typically captured and processed in a specific coordinate system which is measured at 1:1.
D - Data density: The amount of data points per unit of area captured by a laser scanner. Data density is a critical factor in laser scanning as it affects the level of detail and accuracy of the resulting 3D model.
D - Data fusion: The process of integrating and combining data from multiple sensors and sources, such as laser scanners, cameras, and GPS, to create a more comprehensive and accurate representation of the environment.
D - dB (Decibel): A unit used to measure the strength or intensity of a signal, such as an echo signal returned by a laser scanner.
D - Dead Reckoning: Dead reckoning is a technique used in laser scanning and other navigation systems to estimate the current position of a scanner or other device based on its previous position and movement. Dead reckoning typically relies on a combination of sensors, such as accelerometers and gyroscopes, to measure changes in direction and velocity over time. This information is used to estimate the device's current position, which can be useful for navigating in areas where GPS or other external positioning systems are not available.
D - Detection Threshold: The minimum amplitude or strength of an echo signal that can be detected by a laser scanner. Detection threshold affects the range and accuracy of laser scanning measurements.

D - Double Scan: A double scan is a laser scanning technique that involves scanning an area or target from the same position twice. The purpose of the double scan is to detect and remove any noise or moving objects that may have been captured in the first scan, resulting in a cleaner and more accurate point cloud. This technique is particularly useful in applications such as industrial metrology or construction site monitoring, where accuracy and precision are critical.
D - Drift: A systematic error or bias in laser scanning measurements that can result from environmental factors, such as changes in temperature or pressure.
D - Dynamic range: The range of amplitudes or strengths of echo signals that a laser scanner can detect. Dynamic range affects the sensitivity and accuracy of laser scanning measurements.
E - Echo digitization: The process of converting analogue echo signals returned by a laser scanner into digital signals that can be processed by a computer.
E - Echo processing: The process of analysing and interpreting the echoes received by a laser scanner, which involves techniques such as filtering, segmentation, and classification of point clouds.
E - Echo signal: The signal returned by a laser scanner after it has emitted a laser pulse and the pulse has reflected off a target surface. The echo signal contains information about the range, amplitude, and other properties of the target surface.
E - Elevation: The height of a point above a reference surface, such as the ground or sea level. Laser scanners can capture elevation data for every point in a scanned area, creating a highly detailed and accurate 3D model of the terrain.
E - Errors: The mismatch of scan data to itself or known survey control points.
F - Feature extraction: The process of identifying and isolating specific features or objects in a point cloud, such as pipes, walls, or trees, for further analysis or modelling.
F - Field of view: The maximum area that a laser scanner can capture at a given distance. The field of view is determined by the scanning angle and the range of the laser scanner.
F - Full waveform analysis: A technique used to analyse the entire waveform of an echo signal returned by a laser scanner. Full waveform analysis can provide more detailed information about the target surface than other laser scanning techniques.
G - Galileo: A satellite navigation system developed by the European Union that provides positioning and timing information.
G - Georeferencing: The process of assigning geographic coordinates or spatial references to a laser scanning dataset, which allows it to be integrated with other geospatial data and used for mapping and analysis.
G - GLONASS: A satellite navigation system developed by Russia that provides positioning and timing information.

G - GNSS (Global Navigation Satellite System): A system of satellite-based navigation systems, including GPS, GLONASS, Galileo, and BDS.
G - GPS: The Global Positioning System, a satellite-based navigation system originally developed and operated by the United States government. Now also deployed by various other countries.
G - GrandSLAM: GrandSLAM is a real-time simultaneous localization and mapping (SLAM) technology that is used in some advanced laser scanning systems, such as the Leica BLK2GO. GrandSLAM combines data from multiple sensors, including a laser scanner, cameras, and an inertial measurement unit (IMU), to create highly accurate and detailed 3D point cloud of the environment captured.
G - Green Laser: A green laser is a type of laser that emits green light with a wavelength of approximately 532 nanometres. Green lasers are commonly used in laser scanning applications due to their increased visibility and ability to penetrate certain materials better than other laser wavelengths. They are also used in a variety of other applications, such as astronomy, military, bathymetry, and medical fields.
H - High-definition surveying (HDS): A term often used interchangeably with laser scanning, referring to the use of advanced laser scanning technology to capture highly detailed and accurate 3D models of complex environments.
I - Inertial navigation system (INS): A system that uses accelerometers and gyroscopes to measure and track the motion and orientation of a laser scanner or other device, which can be used to improve the accuracy of point cloud registration and trajectory estimation.
I - Infrared LiDAR Scanning: Infrared LiDAR scanning is a technique that uses lasers with infrared wavelengths to capture 3D data of environments or objects. Infrared LiDAR scanners can penetrate certain materials, such as foliage, more effectively than other wavelengths, making them ideal for applications such as forestry or agriculture. They are also used in a variety of other applications, such as autonomous vehicles and robotics.
I - Integrated IMU/GNSS system: A system that combines an inertial measurement unit (IMU) with a global navigation satellite system (GNSS) receiver. Integrated IMU/GNSS systems can provide more accurate and reliable positioning and orientation information than either system alone.
I - Intensity: The strength or brightness of the laser signal reflected by a surface. Intensity data can be used to distinguish between different materials or surface properties in a scanned area.
J - Jitter: The small, random movements or vibrations that can affect the accuracy of laser scanning measurements. Jitter can be caused by factors such as wind, vehicle traffic, or equipment vibration.
J - Joint multi-sensor data fusion: The process of integrating data from multiple sensors, including laser scanners, cameras, and other devices, to create a more comprehensive and accurate representation of the environment.
K - Kinematic scanning: The use of a mobile laser scanner mounted on a moving platform, such as a vehicle, boat, or drone, to capture 3D data while in motion. Kinematic scanning is used to capture data for large areas or to create 3D models of dynamic environments.
K - Kriging: A geostatistical technique that uses spatial autocorrelation to interpolate or estimate values for points in a laser scanning dataset based on the values of nearby points.
L - Laser: Actually an acronym, which stands for Light Amplification by Stimulated Emission of Radiation.
L - Laser class: A classification system for lasers based on their potential to cause eye and skin damage. Laser classes range from Class 1 (safe under normal use conditions) to Class 4 (potentially hazardous).
L - Laser footprint: The area on a target surface that is illuminated by a laser pulse emitted by a laser scanner.
L - Laser scanner maximum range: The maximum distance at which a laser scanner can accurately measure a target surface. Laser scanner range is influenced by factors such as laser power, detector sensitivity, and atmospheric conditions.
L - Levelled/Unlevelled Scans: Scan setups can have level information applied to the whole scan setup from a scanner-based sensor such as a level compensator. Scans that have no level information are known as unlevelled.
L - LiDAR Simulator: Software tools that simulate the performance of LiDAR systems in a virtual environment, allowing users to evaluate and optimize system settings and configurations before deploying them in the field.

L - LiDAR: A common abbreviation for light detection and ranging, referring to the use of laser light to measure distances and create a 3D point cloud of the environment. LiDAR is often used interchangeably with laser scanning.
L - Loop Closure: The process of matching points in different parts of a laser scan to ensure that they represent the same physical feature. Loop closure is important for creating accurate and complete 3D models from laser scan data.
M - Measurement rate: The rate at which a laser scanner can acquire measurement data, typically measured in points per second. Measurement rate affects the speed and efficiency of laser scanning operations.
M - Mesh: A surface representation of a point cloud that uses triangles to connect adjacent points and create a smooth continuous surface.
M - MTA (Multiple Time Around): A technique used by laser scanners to measure distances to targets that are beyond their maximum range. MTA involves emitting multiple laser pulses and measuring the time of flight of each pulse.
M - Multiple-return: The ability of a laser scanner to capture multiple reflections of the laser signal from a single point in a scanned area. Multiple-return scanning is used to capture data for complex environments, such as forests or urban areas.
M - Multi-target resolution: The ability of a laser scanner to distinguish between multiple targets that are close together. Multi-target resolution is important for accurately capturing complex geometric features.
N - Noise reduction: The process of removing or minimizing unwanted signals or interference in a laser scanning dataset, which can be caused by factors such as ambient light, atmospheric conditions, or surface texture.
N - Noise: Any unwanted or extraneous data that can affect the accuracy and quality of laser scanning measurements. Noise can be caused by factors such as interference, dust, or other environmental factors.
N - Normals: Normals are estimated for each point in a point cloud to provide information about the local surface orientation. They can be computed using techniques such as principal component analysis (PCA) or covariance matrix estimation. Normals are often used for tasks such as surface reconstruction, segmentation, and object recognition.
O - Object-based modelling: The creation of 3D models from laser scan data by identifying and modelling individual objects or features in the scanned area. Object-based modelling is used to create highly detailed and accurate 3D models of complex environments.
O - Occlusion: The blocking or obscuring of part of an object or surface from the scanner's line of sight, which can result in incomplete or inaccurate data.
O - Octree: A hierarchical data structure used to organize and efficiently process large point cloud datasets by dividing the data into smaller, more manageable subsets.
P - Point cloud classification: The process of assigning labels or attributes to points in a point cloud based on their characteristics, such as reflectivity, shape, or location, to facilitate analysis and modelling.
The point cloud classification is a process which is based on machine learning techniques required for training on labelled data. The geometry and the nature of the information are used to assign the points of the densified point cloud into one of the predefined groups.
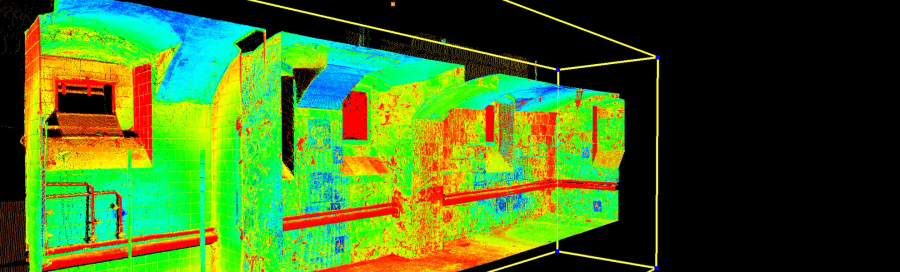
P - Point cloud: A huge collection of points plotted in a 3D space that have been captured by a laser scanner. Point clouds can be used to create highly detailed and accurate 3D models of the environment.
P - Point density: The number of points per unit area or volume in a point cloud, which can vary depending on the scanning resolution and the distance between the scanner and the object, or surface, being scanned.
P - Precision: The degree of consistency and repeatability of laser scanning measurements. Precision is influenced by factors such as the quality of the laser scanner, environmental conditions, and the measurement technique.
P - PRR (Pulse Repetition Rate): The rate at which a laser scanner emits laser pulses, typically measured in hertz. PRR affects the measurement rate and accuracy of laser scanning operations.
P - Pulse-Based LiDAR: Pulse-based LiDAR is a type of LiDAR system that emits short pulses of laser light and measures the time it takes for the light to reflect from a target. This information is used to create a three-dimensional representation of the target, which can be used for a variety of applications such as surveying, mapping, and object detection. Pulse-based LiDAR systems are typically more accurate than continuous-wave systems but are also more complex and expensive.
Q - Quality control: The process of verifying and validating the accuracy and completeness of laser scanning data, which can involve techniques such as comparing point clouds to reference models, checking for outliers or errors, and assessing data consistency.
R - Range gate: A software-defined window within the full waveform of an echo signal that is used to extract specific range information. Range gates are used to filter out noise and improve the accuracy of laser scanning measurements.
R - Range: The maximum distance that a laser scanner can measure accurately. Range is determined by the power and frequency of the laser used by the scanner.
R - Real-time Registration: Real-time Registration is a process in which point cloud data is registered or aligned with other data sources, such as GPS or images, in real-time. This technique allows for more efficient and accurate data acquisition, as it eliminates the need for post-processing registration. Real-time registration is commonly used in mobile laser scanning applications, such as mapping roads or railways.
R - Red Laser: A red laser is a type of laser that emits red light with a wavelength of approximately 635 to 670 nanometres. Red lasers are commonly used in laser scanning applications due to their affordability and availability. They are also used in a variety of other applications, such as laser pointers, barcode scanners, and optical data storage.
R - Reflectance: The proportion of incident light that is reflected by a target surface. Reflectance affects the strength and amplitude of echo signals returned by a laser scanner.
R - Registration: The process of aligning and combining multiple scans of the same area into a single, unified point cloud.
R - Retro-reflective target: A target surface that reflects light back to its source directionally, such as a reflective tape or marker. Retro-reflective targets can be more easily and accurately measured with a laser scanner than diffusely reflecting targets.
R - Reverse engineering: The process of using laser scanning and other techniques to create a digital 3D model of an existing object or structure, which can then be modified or replicated.
R - RICS (Royal Institute of Chartered Surveyors): A professional organization that represents the interests of surveyors and geospatial professionals worldwide, which includes a focus on laser scanning and other remote sensing technologies.
S - Scan angle: The angular range over which a laser scanner can capture data, which can be fixed or adjustable depending on the scanner design.
S - Scan mechanism: The mechanical or electronic components of a laser scanner that control the direction and orientation of the laser beam. Scan mechanisms can be rotating mirrors, oscillating mirrors, or electronic beam steering systems.
S - Scan-to-BIM: The process of using laser scanning and other technologies to create a digital 3D model of an existing building or structure that can be used for building information modelling (BIM) and other applications.
S - SLAM (Simultaneous Localisation and Mapping): A technique used by laser scanners and other sensors to create maps and localize themselves within those maps in real-time.
S - SOCS (Scanner’s Own Coordinate System): The coordinate system used by a laser scanner to define the position and orientation of its laser beam and measurement data. SOCS is important for accurately registering laser scan data with other data sources.
S - Station: Location from where the points were measured.
S - Structured Point Cloud: Structured point clouds are point clouds where the points are arranged in a regular grid or lattice. Additional information is stored on each point, e.g. vertical angle, horizontal angle, and distance to the point from the original setup location. This structure allows for more efficient processing of the data and can make it easier to extract features or perform analysis.
S - System response: The overall performance of a laser scanning system, including its accuracy, precision, measurement rate, and other characteristics.
S - SSSI: The Surveying and Spatial Sciences Institute is the professional association for surveyors and spatial science workers, including in cartography, hydrography, remote sensing, engineering and mining surveying, photogrammetry and spatial information in Australia.
S - Solid State LiDAR: Solid state LiDAR typically uses a single laser beam to illuminate the scene in front of it, and a time of flight (TOF) sensor array to capture the 3D data that is returned.
The obvious choice for cost, reliability, and manufacturability is a solid-state LiDAR – a sensor with a simple design and no moving parts that delivers the performance that OEMs (Original Equipment manufacturers) need for autonomous driving features.
T - Targets: Objects or markers used to improve the accuracy and efficiency of laser scanning. They include stickers, tilt and turn axis targets, spheres, or even virtual targets selected from the point cloud. Targets are placed in the scanning area to create reference points for the laser scanner to measure distances and angles accurately. By surveying the targets, the operator can align and register the data to a common coordinate system, a process known as georeferencing. Targets are often used in applications that require high precision, such as surveying, construction, architecture, and archaeology.
S - Segmentation: Segmentation is the process of grouping point clouds into multiple homogeneous regions with similar properties, whereas classification is the step that labels these regions. The main goal is to analyse the most popular methodologies and algorithms to segment and classify 3D point clouds.
T - Terrestrial laser scanning: The use of a stationary laser scanner mounted on a tripod or other stable platform to capture 3D data of the environment. Terrestrial laser scanning is used to create highly accurate and detailed 3D models of buildings, infrastructure, and other objects.
T - Timestamp: A timestamp or date stamp that is associated with each laser scan data point. Timestamps are used to synchronize and align laser scan data with other data sources.
T - TOF (Time of Flight): The time it takes for a laser pulse to travel from a laser scanner to a target surface and back to the scanner. TOF is used to calculate the range to the target surface.
T - Trajectory: The path followed by a laser scanner as it acquires laser scan data. Trajectory information is used to accurately register laser scan data with other data sources and to create 3D models of the scanned environment.
U - Uncertainty: The degree of error or imprecision in laser scanning measurements, which can be affected by a variety of factors such as scanner resolution, noise, calibration, or even perhaps environmental conditions.
U - Unified Point Cloud: A unified point cloud is created by merging multiple point clouds into a single coordinate system. This can provide a more complete and accurate representation of the object or environment being scanned and is useful for larger areas or objects that cannot be captured in a single scan.
U - Unstructured Point Cloud: Unstructured point clouds are point clouds where the points are not arranged in a regular grid or lattice. When compared with a structured point cloud, you’ll notice the additional information like horizontal angle, vertical angle, and distance is not stored. They are often used to represent complex surfaces or objects that do not have a regular structure, such as natural terrain or buildings with irregular shapes.
U - UTC (Coordinated Universal Time): The standard time scale used by most laser scanners to synchronize their internal clocks and timestamps. UTC is based on atomic clocks and is highly accurate and stable.
V - Vegetation penetration: The ability of laser energy to penetrate through dense vegetation or foliage to reach the ground or other targets, which can be affected by factors such as wavelength and pulse duration.
V - Visibility: The extent to which a laser scanner can see and acquire data from objects and surfaces within its range. Visibility is influenced by factors such as the power and wavelength of the laser, the reflectivity of the target surface, and atmospheric conditions.
V - Volumetric modelling: The creation of 3D models by calculating the volume of objects or features in the scanned area. Volumetric modelling is used to create highly detailed and accurate 3D models of complex environments.
V - Voxel: A three-dimensional pixel in a point cloud that represents a small volume of space. Voxels are used to represent and analyse point cloud data and can be visualized as a 3D grid of small cubes.
W - Wavelength: The distance between two consecutive peaks or troughs of a laser beam. Wavelength affects the accuracy and precision of laser scanning measurements.
X - X, Y, Z coordinates: The three-dimensional coordinates that define the position of a point in space. Laser scanners capture X, Y, and Z coordinates for every point in a scanned area, creating a highly detailed and accurate 3D model of the environment.
Y - Yellow laser: A type of laser used in some laser scanners to capture data for vegetation and other highly reflective surfaces. Yellow lasers are less affected by backscatter and can penetrate dense vegetation more effectively than other types of lasers.
Y - Yield mapping: The process of using laser scanning and other techniques to create a detailed map of crop yield and other agricultural parameters, which can be used to optimize planting, fertilization, and harvesting.
Z - Zoom LiDAR: A type of laser scanning technology that uses variable focal length optics to adjust the laser beam diameter and range, allowing for higher resolution and greater flexibility in scanning parameters.
Z - Zoom: The ability of some laser scanners to adjust the field of view and resolution of the laser beam. Zoom is used to capture data for objects or features at different distances and scales.
In conclusion, laser scanning is a highly specialized technology that requires a deep understanding of technical terms and jargon. This A-Z glossary provides an overview of the most common terms and concepts in laser scanning and can be a valuable resource for anyone looking to learn more about this fascinating technology.
Overall, laser scanning terminology can be complex and technical, but understanding these terms is important for effectively using and interpreting laser scan data. With continued advancements in laser scanning technology, it is likely that new terms and concepts will continue to emerge, making it important to stay up to date with the latest developments and trends in the field.





